freertos消息队列
透查本质
本质还是管理数据结构, 和c++的queue是差不多的。然后加了一层任务管理和调试信息。
消息队列简介
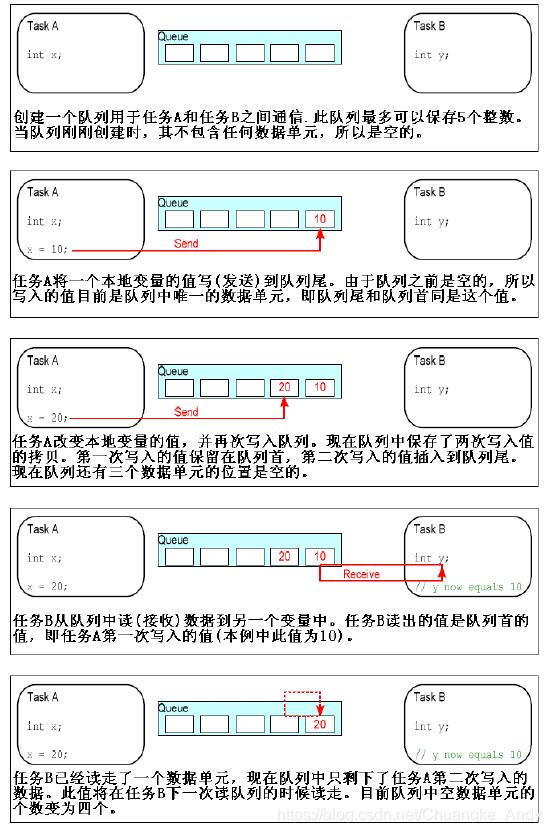
消息队列可以在任务与任务、任务与中断之间传递消息,队列可以保存有限个具有确定长度的数据单元。队列可保存的最大单元数目被称为队列的长度,在队列创建时需要指定其长度和每个单元(队列项或消息)的大小。通常情况下,队列被作为FIFO(先进先出)使用,即数据由队尾写入,从队首读出。当然由队列首写入也是可能的。

队列有如下特性:
数据存储:往队列写入数据是通过字节拷贝把数据复制存储到队列中;从队列读出数据使得把队列中的数据拷贝删除 可被多任务存取:队列不是属于某个特别指定的任务的,任何任务都可以向队列中发送消息,或者从队列中提取消息 读队列时阻塞:当某个任务试图读一个队列时,其可以指定一个阻塞超时时间。在这段时间中,若队列为空,该任务将保持阻塞状态以等待队列数据有效。当其他任务或中断服务程序往其等待的队列中写入了数据,该任务将自动由阻塞态转移为就绪态。当等待的时间超过了指定的阻塞时间,即使队列中尚无有效数据,任务也会自动由阻塞态转移为就绪态 写队列时阻塞:任务也可以在写队列时指定一个阻塞超时时间。这个时间是当被写队列已满时,任务进入阻塞态以等待队列空间有效的最长时间
队列读写过程如下图所示
队列的结构体 Queue_t 如下示,该结构体在queue.c文件中定义:
typedef struct QueueDefinition
{
int8_t *pcHead; /* 指向队列存储区开始地址 */
int8_t *pcTail; /* 指向队列存储区最后一个字节 */
int8_t *pcWriteTo; /* 指向存储区中下一个空闲区域 */
union
{
/* 当用作队列的时候指向最后一个出队的队列项首地址 */
int8_t *pcReadFrom;
/* 当用作递归互斥量的时候用来记录递归互斥量被调用的次数 */
UBaseType_t uxRecursiveCallCount;
} u;
List_t xTasksWaitingToSend; /* 等待发送任务列表 */
List_t xTasksWaitingToReceive; /* 等待接收任务列表 */
volatile UBaseType_t uxMessagesWaiting;/* 队列中当前队列项数量(消息数) */
UBaseType_t uxLength; /* 创建队列时指定的队列长度 */
UBaseType_t uxItemSize; /* 创建队列时指定的每个队列项(消息)最大长度 */
/* 当队列上锁后用来统计从队列中接收到(出队的)的队列项数量,若未上锁为queueUNLOCKED */
volatile int8_t cRxLock;
/* 当队列上锁后用来统计发送到(入队的)队列中的队列项数量,若未上锁为queueUNLOCKED */
volatile int8_t cTxLock;
#if( ( configSUPPORT_STATIC_ALLOCATION == 1 ) && ( configSUPPORT_DYNAMIC_ALLOCATION == 1 ) )
uint8_t ucStaticallyAllocated; /* 若使用静态存储,赋值为pdTURE */
#endif
#if ( configUSE_QUEUE_SETS == 1 ) /* 队列集相关宏 */
struct QueueDefinition *pxQueueSetContainer;
#endif
#if ( configUSE_TRACE_FACILITY == 1 ) /* 跟踪调试相关宏 */
UBaseType_t uxQueueNumber;
uint8_t ucQueueType;
#endif
} xQUEUE;
/* 老版本的FreeRTOS中队列可能会使用xQUEUE这个名字,新版本都用Queue_t */
typedef xQUEUE Queue_t;
消息队列的函数应用
创建消息队列
在使用队列之前必须先创建队列,有动态和静态创建队列两种方法。以下四个函数原型在queue.c文件中定义
/********************动态创建队列**********************************************************************/
QueueHandle_t xQueueCreate(UBaseType_t uxQueueLength, //要创建的队列长度(队列的项目数)
UBaseType_t uxItemSize); //队列项(消息)的长度(字节)
/********************动态创建队列**********************************************************************/
QueueHandle_t xQueueGenericCreate(const UBaseType_t uxQueueLength,//要创建的队列长度(队列的项目数)
const UBaseType_t uxItemSize, //队列项(消息)的长度(字节)
const uint8_t ucQueueType); //队列类型
/********************静态创建队列**********************************************************************/
QueueHandle_t xQueueCreateStatic(UBaseType_t uxQueueLength,//要创建的队列长度(队列的项目数)
UBaseType_t uxItemSize, //队列项(消息)的长度(字节)
uint8_t *pucQueueStorage, //指向队列项的存储区
StaticQueue_t *pxStaticQueue);//用来保存队列结构体
/********************静态创建队列**********************************************************************/
QueueHandle_t xQueueGenericCreateStatic(const UBaseType_t uxQueueLength,//要创建的队列长度(队列的项目数)
const UBaseType_t uxItemSize,//队列项(消息)的长度(字节)
uint8_t *pucQueueStorage,//指向队列项的存储区
StaticQueue_t *pxStaticQueue,//用来保存队列结构体
const uint8_t ucQueueType);//队列类型
/*****************************************************************************************************/
返回值:创建成功返回队列句柄;失败返回NULL
动态创建队列最终会调用xQueueGenericCreate()函数,下面来分析该源码(静态创建类似,不做分析)
QueueHandle_t xQueueGenericCreate(const UBaseType_t uxQueueLength,
const UBaseType_t uxItemSize,
const uint8_t ucQueueType ){
Queue_t *pxNewQueue;
size_t xQueueSizeInBytes;
uint8_t *pucQueueStorage;
if( uxItemSize == ( UBaseType_t ) 0 ){
/* 如果队列项大小为0,就不需要存储区 */
xQueueSizeInBytes = ( size_t ) 0;
}
else{
/* 最大队列项数量乘以单个队列项大小,就是消息存储区的大小 */
xQueueSizeInBytes = ( size_t ) ( uxQueueLength * uxItemSize );
}
/* 给队列申请内存空间=队列结构体大小+消息存储区大小 */
pxNewQueue = ( Queue_t * ) pvPortMalloc( sizeof( Queue_t ) + xQueueSizeInBytes );
if( pxNewQueue != NULL ){ //内存申请成功
/* 计算出消息存储区的首地址 */
pucQueueStorage = ( ( uint8_t * ) pxNewQueue ) + sizeof( Queue_t );
/* 初始化消息队列 */
prvInitialiseNewQueue( uxQueueLength, uxItemSize, pucQueueStorage, ucQueueType, pxNewQueue );
}
return pxNewQueue;
}
队列初始化函数prvInitialiseNewQueue()源码分析
static void prvInitialiseNewQueue(const UBaseType_t uxQueueLength,
const UBaseType_t uxItemSize,
uint8_t *pucQueueStorage,
const uint8_t ucQueueType,
Queue_t *pxNewQueue){
/* 防止编译器报错 */
( void ) ucQueueType;
if(uxItemSize == ( UBaseType_t ) 0){
/* 若队列项长度为0,说明没有队列存储区 */
pxNewQueue->pcHead = ( int8_t * ) pxNewQueue;
}
else{
/* 把队列空间首地址指向队列项存储区首地址 */
pxNewQueue->pcHead = ( int8_t * ) pucQueueStorage;
}
/* 初始化队列结构体相关成员变量 */
pxNewQueue->uxLength = uxQueueLength;
pxNewQueue->uxItemSize = uxItemSize;
/* 队列复位 */
( void ) xQueueGenericReset( pxNewQueue, pdTRUE );
}
队列复位函数xQueueGenericReset源码分析
BaseType_t xQueueGenericReset( QueueHandle_t xQueue, BaseType_t xNewQueue){
Queue_t * const pxQueue = ( Queue_t * ) xQueue;
//进入临界段,此时操作队列控制块,不允许被打断
taskENTER_CRITICAL();
{
/* 初始化队列相关成员变量*/
pxQueue->pcTail = pxQueue->pcHead + ( pxQueue->uxLength * pxQueue->uxItemSize );//头地址赋值
pxQueue->uxMessagesWaiting = ( UBaseType_t ) 0U;//等待处理的消息个数为0
pxQueue->pcWriteTo = pxQueue->pcHead;//写入指针赋值为队列头指针
pxQueue->u.pcReadFrom = pxQueue->pcHead + ( ( pxQueue->uxLength - ( UBaseType_t ) 1U ) * pxQueue->uxItemSize );//读出指针写入最后一个可用消息
pxQueue->cRxLock = queueUNLOCKED;//赋值队列锁为解锁状态
pxQueue->cTxLock = queueUNLOCKED;//赋值队列锁为解锁状态
/* 判断是否为新建队列,若不是还需要其他处理 */
if( xNewQueue == pdFALSE ){
/* 判断发送等待列表里面是否有任务 */
if(listLIST_IS_EMPTY(&(pxQueue->xTasksWaitingToSend))==pdFALSE){
/* 移除事件列表中的任务 */
if(xTaskRemoveFromEventList(&(pxQueue->xTasksWaitingToSend))!=pdFALSE){
/* 进行上下文切 */
queueYIELD_IF_USING_PREEMPTION();
}
else{
mtCOVERAGE_TEST_MARKER();
}
}
else{
mtCOVERAGE_TEST_MARKER();
}
}
else{
/* 若是新建队列,则直接初始化发送和接受列表项 */
vListInitialise( &( pxQueue->xTasksWaitingToSend ) );
vListInitialise( &( pxQueue->xTasksWaitingToReceive ) );
}
}
taskEXIT_CRITICAL();
return pdPASS;
}
向队列发送消息
任务级入队函数
/**********发送消息到队尾********************************************************************************/
BaseType_t xQueueSend(QueueHandle_t xQueue,//队列句柄,指明向哪个队列发送数据
const void *pvItemToQueue,//指向要发送的消息
TickType_t xTicksToWait);//队列满时,任务进入阻塞态等待队列空闲的最大时间(阻塞时间)
/**********发送消息到队尾********************************************************************************/
BaseType_t xQueueSendToBack(QueueHandle_t xQueue,//队列句柄,指明向哪个队列发送数据
const void *pvItemToQueue,//指向要发送的消息
TickType_t xTicksToWait);//阻塞时间
/**********发送消息到队头********************************************************************************/
BaseType_t xQueueSendToFront(QueueHandle_t xQueue,//队列句柄,指明向哪个队列发送数据
const void *pvItemToQueue,//指向要发送的消息
TickType_t xTicksToWait);//阻塞时间
/**********发送消息到队列(带覆写功能,即队列满了以后会覆写掉旧的数据)*************************************/
BaseType_t xQueueOverwrite(QueueHandle_t xQueue,//队列句柄,指明向哪个队列发送数据
const void *pvItemToQueue);//指向要发送的消息
/**********任务级通用入队函数***************************************************************************/
BaseType_t xQueueGenericSend(QueueHandle_t xQueue, //队列句柄,指明向哪个队列发送数据
const void * const pvItemToQueue, //指向要发送的消息
TickType_t xTicksToWait,//阻塞时间
const BaseType_t xCopyPosition);//入队方式(后向/前向/覆写)
/******************************************************************************************************/
返回值:发送消息成功,返回pdPASS;队列满消息发送失败,返回errQUEUE_FULL
任务级入队函数最终都是调用xQueueGenericSend()函数,下面来分析该函数源码
BaseType_t xQueueGenericSend(QueueHandle_t xQueue,
const void * const pvItemToQueue,
TickType_t xTicksToWait,
const BaseType_t xCopyPosition){
BaseType_t xEntryTimeSet = pdFALSE, xYieldRequired;
TimeOut_t xTimeOut;
Queue_t * const pxQueue = ( Queue_t * ) xQueue;
/* 使用for死循环,是为了快速的处理消息拷贝 */
for( ;; ){
taskENTER_CRITICAL(); //进入了临界段
{
/* 判断消息队列是否满了以及是否允许覆盖入队,任一条件成立都执行入队操作 */
if((pxQueue->uxMessagesWaiting < pxQueue->uxLength)||(xCopyPosition == queueOVERWRITE)) {
/* 拷贝数据到队列操作空间内 */
xYieldRequired = prvCopyDataToQueue(pxQueue, pvItemToQueue, xCopyPosition);
#if ( configUSE_QUEUE_SETS == 1 )
{ /*......省略掉与队列集相关代码......*/ }
#else /* configUSE_QUEUE_SETS */
{
/* 判断等待接收的列表是否为空. */
if(listLIST_IS_EMPTY(&(pxQueue->xTasksWaitingToReceive)) == pdFALSE){
/* 若不为空,表示有任务由于请求消息而阻塞,则改变阻塞态为就绪态. */
if(xTaskRemoveFromEventList(&(pxQueue->xTasksWaitingToReceive)) != pdFALSE){
/* 进行上下文切换*/
queueYIELD_IF_USING_PREEMPTION();
}
else{
mtCOVERAGE_TEST_MARKER();
}
}
else if( xYieldRequired != pdFALSE){
/* 再次进行上下文切换 */
queueYIELD_IF_USING_PREEMPTION();
}
else{
mtCOVERAGE_TEST_MARKER();
}
}
#endif /* configUSE_QUEUE_SETS */
taskEXIT_CRITICAL(); //退出临界段
return pdPASS; //返回pdPASS,标记入队成功
}
else{
/* 队列满了不允许入队时,先判断是否需要阻塞 */
if( xTicksToWait == ( TickType_t ) 0 ){
/* 为0表示,表示没有阻塞时间 */
taskEXIT_CRITICAL();//退出临界段
traceQUEUE_SEND_FAILED( pxQueue );
return errQUEUE_FULL;//返回队列已满
}
else if( xEntryTimeSet == pdFALSE ){
/* 若有阻塞时间,就初始化时间结构体*/
vTaskSetTimeOutState( &xTimeOut );
xEntryTimeSet = pdTRUE;
}
else{
/* 时间结构体已经初始化过了 */
mtCOVERAGE_TEST_MARKER();
}
}
}
taskEXIT_CRITICAL();//退出临界段
/* 执行到这里说明当前队列已满,并且设置了不为0的阻塞时间 */
vTaskSuspendAll();//挂起任务调度器
prvLockQueue( pxQueue );//给队列上锁
/* 判断阻塞时间是否超时了 */
if( xTaskCheckForTimeOut( &xTimeOut, &xTicksToWait ) == pdFALSE){
/* 若未超时,则判断队列是否还是满的 */
if( prvIsQueueFull( pxQueue ) != pdFALSE ){
/* 若此时队仍满且未超时,则把当前任务添加到等待发送的事件列表和延时列表中去*/
traceBLOCKING_ON_QUEUE_SEND( pxQueue );
vTaskPlaceOnEventList( &( pxQueue->xTasksWaitingToSend ), xTicksToWait );
prvUnlockQueue( pxQueue );//解锁队列
if( xTaskResumeAll() == pdFALSE ){//恢复任务调度器
portYIELD_WITHIN_API();//进行上下文切换
}
}
else{
/* 若此时队列未满,但未超时,则重新进行入队操作 */
prvUnlockQueue( pxQueue );
( void ) xTaskResumeAll();
}
}
else{
/* 若已超时,则解锁队列,恢复任务调度器 */
prvUnlockQueue( pxQueue );
( void ) xTaskResumeAll();
traceQUEUE_SEND_FAILED( pxQueue );
return errQUEUE_FULL;//返回队列已满
}
}
}
中断级入队函数
/**********发送消息到队尾*****************************************************************************/
BaseType_t xQueueSendFromISR(QueueHandle_t xQueue,//队列句柄,指明向哪个队列发送数据
const void * pvItemToQueue,//指向要发送的消息
BaseType_t * pxHigherPriorityTaskWoken);//标记退出此函数后是否进行任务切换
/**********发送消息到队尾****************************************************************************/
BaseType_t xQueueSendToBackFromISR(QueueHandle_t xQueue,
const void * pvItemToQueue,
BaseType_t * pxHigherPriorityTaskWoken);
/**********发送消息到队头****************************************************************************/
BaseType_t xQueueSendToFrontFromISR(QueueHandle_t xQueue,
const void * pvItemToQueue,
BaseType_t * pxHigherPriorityTaskWoken);
/**********发送消息到队列(带覆写功能,即队列满了以后会覆写掉旧的数据)********************************/
BaseType_t xQueueOverwriteFromISR(QueueHandle_t xQueue,
const void * pvItemToQueue,
BaseType_t * pxHigherPriorityTaskWoken);
/**********中断级通用入队函数***********************************************************************/
BaseType_t xQueueGenericSendFromISR(QueueHandle_t xQueue,
const void * pvItemToQueue,
BaseType_t * pxHigherPriorityTaskWoken,
BaseType_t xCopyPosition);//入队方式(后向/前向/覆写)
/*************************************************************************************************/
返回值:发送消息成功,返回pdPASS;队列满消息发送失败,返回errQUEUE_FULL
中断级入队函数最终都是调用xQueueGenericSendFromISR()函数,下面来分析该函数源码
BaseType_t xQueueGenericSendFromISR(QueueHandle_t xQueue,
const void * const pvItemToQueue,
BaseType_t * const pxHigherPriorityTaskWoken,
const BaseType_t xCopyPosition){
BaseType_t xReturn;
UBaseType_t uxSavedInterruptStatus;
Queue_t * const pxQueue = ( Queue_t * ) xQueue;
/* 带返回值的关闭中断,需要保存上次关闭中断的状态值,恢复时候写入 */
uxSavedInterruptStatus = portSET_INTERRUPT_MASK_FROM_ISR();
{
/* 判断消息队列是否满了以及是否允许覆盖入队,任一条件成立都执行入队操作 */
if( ( pxQueue->uxMessagesWaiting < pxQueue->uxLength ) || ( xCopyPosition == queueOVERWRITE ) )
{
/* 获取队列发送锁的状态值 */
const int8_t cTxLock = pxQueue->cTxLock;
/* 拷贝数据到队列操作空间内 */
( void ) prvCopyDataToQueue( pxQueue, pvItemToQueue, xCopyPosition );
/* 判断队列是否上锁 */
if( cTxLock == queueUNLOCKED ){ //若队列未上锁
#if ( configUSE_QUEUE_SETS == 1 )
{/*......省略掉与队列集相关代码......*/}
#else /* configUSE_QUEUE_SETS */
{
/* 判断等待接收的列表是否为空. */
if(listLIST_IS_EMPTY(&(pxQueue->xTasksWaitingToReceive) == pdFALSE){
/* 若不为空,表示有任务由于请求消息而阻塞,则改变阻塞态为就绪态. */
if(xTaskRemoveFromEventList( &( pxQueue->xTasksWaitingToReceive))!= pdFALSE){
/* 若上一步变成就绪态的任务优先级比当前任务高,则标记为pdTRUE,表示要进行任务切换 */
if( pxHigherPriorityTaskWoken != NULL ){
*pxHigherPriorityTaskWoken = pdTRUE;
}
else{
mtCOVERAGE_TEST_MARKER();
}
}
else{
mtCOVERAGE_TEST_MARKER();
}
}
else{
mtCOVERAGE_TEST_MARKER();
}
}
#endif /* configUSE_QUEUE_SETS */
}
else{ //若队列已经上锁
/* 发送锁加一,表示进行了一次入队操作 */
pxQueue->cTxLock = ( int8_t ) ( cTxLock + 1 );
}
xReturn = pdPASS;//返回pdPASS,表示入队完成
}
else{ //若队列满
traceQUEUE_SEND_FROM_ISR_FAILED( pxQueue );
xReturn = errQUEUE_FULL;//返回errQUEUE_FULL,表示队列满
}
}
/* 开启中断,保存上次状态值 */
portCLEAR_INTERRUPT_MASK_FROM_ISR( uxSavedInterruptStatus );
return xReturn;
}
队列上锁和解锁
队列上锁
prvLockQueue():本质上是一个宏,定义如下
//就是将队列中的成员变量cRxLock和cTxLock设置为queueLOCKED_UNMODIFIED
#define prvLockQueue( pxQueue ) \
taskENTER_CRITICAL(); \
{ \
if( ( pxQueue )->cRxLock == queueUNLOCKED ) \
{ \
( pxQueue )->cRxLock = queueLOCKED_UNMODIFIED; \
} \
if( ( pxQueue )->cTxLock == queueUNLOCKED ) \
{ \
( pxQueue )->cTxLock = queueLOCKED_UNMODIFIED; \
} \
} \
taskEXIT_CRITICAL()
//上锁计数器cRxLock和cTxLock记录了队列上锁期间,入队或出队的数量
static void prvUnlockQueue( Queue_t * const pxQueue ){
/* 进入临界段 */
taskENTER_CRITICAL();
{
int8_t cTxLock = pxQueue->cTxLock;//获取发送锁的状态值
/* 遍历直到解锁为止,队列上锁后向队列发送消息成功,入队计数器cTxLock会加一 */
while( cTxLock > queueLOCKED_UNMODIFIED ){
#if ( configUSE_QUEUE_SETS == 1 )
{/*......省略掉与队列集相关代码......*/}
#else /* configUSE_QUEUE_SETS */
{
/* 判断等待接收的列表是否为空. */
if( listLIST_IS_EMPTY( &( pxQueue->xTasksWaitingToReceive ) ) == pdFALSE ){
/* 若不为空,将任务从列表中删除 */
if(xTaskRemoveFromEventList(&(pxQueue->xTasksWaitingToReceive)) != pdFALSE){
/* 若移除的任务优先级比当前任务高,则进行任务切换 */
vTaskMissedYield();
}
else{
mtCOVERAGE_TEST_MARKER();
}
}
else{
break;
}
}
#endif /* configUSE_QUEUE_SETS */
--cTxLock;//每处理完一条,队列发送锁就减一,直至处理完成
}
pxQueue->cTxLock = queueUNLOCKED;//处理完成后,解除发送锁
}
taskEXIT_CRITICAL();//退出临界段
/* 接下来处理cRxLock,处理过程与cTxLock类似 */
taskENTER_CRITICAL();
{
int8_t cRxLock = pxQueue->cRxLock;
while( cRxLock > queueLOCKED_UNMODIFIED ){
if(listLIST_IS_EMPTY(&(pxQueue->xTasksWaitingToSend)) == pdFALSE){
if(xTaskRemoveFromEventList(&(pxQueue->xTasksWaitingToSend)) != pdFALSE){
vTaskMissedYield();
}
else{
mtCOVERAGE_TEST_MARKER();
}
--cRxLock;
}
else{
break;
}
}
pxQueue->cRxLock = queueUNLOCKED;
}
taskEXIT_CRITICAL();
}
队列解锁
//上锁计数器cRxLock和cTxLock记录了队列上锁期间,入队或出队的数量
static void prvUnlockQueue( Queue_t * const pxQueue ){
/* 进入临界段 */
taskENTER_CRITICAL();
{
int8_t cTxLock = pxQueue->cTxLock;//获取发送锁的状态值
/* 遍历直到解锁为止,队列上锁后向队列发送消息成功,入队计数器cTxLock会加一 */
while( cTxLock > queueLOCKED_UNMODIFIED ){
#if ( configUSE_QUEUE_SETS == 1 )
{/*......省略掉与队列集相关代码......*/}
#else /* configUSE_QUEUE_SETS */
{
/* 判断等待接收的列表是否为空. */
if( listLIST_IS_EMPTY( &( pxQueue->xTasksWaitingToReceive ) ) == pdFALSE ){
/* 若不为空,将任务从列表中删除 */
if(xTaskRemoveFromEventList(&(pxQueue->xTasksWaitingToReceive)) != pdFALSE){
/* 若移除的任务优先级比当前任务高,则进行任务切换 */
vTaskMissedYield();
}
else{
mtCOVERAGE_TEST_MARKER();
}
}
else{
break;
}
}
#endif /* configUSE_QUEUE_SETS */
--cTxLock;//每处理完一条,队列发送锁就减一,直至处理完成
}
pxQueue->cTxLock = queueUNLOCKED;//处理完成后,解除发送锁
}
taskEXIT_CRITICAL();//退出临界段
/* 接下来处理cRxLock,处理过程与cTxLock类似 */
taskENTER_CRITICAL();
{
int8_t cRxLock = pxQueue->cRxLock;
while( cRxLock > queueLOCKED_UNMODIFIED ){
if(listLIST_IS_EMPTY(&(pxQueue->xTasksWaitingToSend)) == pdFALSE){
if(xTaskRemoveFromEventList(&(pxQueue->xTasksWaitingToSend)) != pdFALSE){
vTaskMissedYield();
}
else{
mtCOVERAGE_TEST_MARKER();
}
--cRxLock;
}
else{
break;
}
}
pxQueue->cRxLock = queueUNLOCKED;
}
taskEXIT_CRITICAL();
}
队列读取消息
任务级出队函数
/**********从队列中读取队列项,读取完后删除队列项**************************************************/
BaseType_t xQueueReceive(QueueHandle_t xQueue,//队列句柄
void * const pvBuffer,//保存数据的缓冲区
TickType_t xTicksToWait);//阻塞时间,表示队列空时进入阻塞态等待数据的最大时间
/**********从队列中读取队列项,读取完后不删除队列项************************************************/
BaseType_t xQueuePeek(QueueHandle_t xQueue,
void * const pvBuffer,
TickType_t xTicksToWait);
/**********从队列中读取队列项通用函数************************************************************/
BaseType_t xQueueGenericReceive(QueueHandle_t xQueue,
void * const pvBuffer,
TickType_t xTicksToWait,
const BaseType_t xJustPeeking);//标记读取成功后是否需要删除队列项
/**********************************************************************************************/
返回值:读取数据成功,返回pdTRUE;读取失败,返回pdFALSE
任务级出队函数最终都是调用xQueueGenericReceive()函数,出队与入队的源码流程差不多,在此不再赘述
中断级出队函数
/**********从队列中读取队列项,读取完后删除队列项*******************************************/
BaseType_t xQueueReceiveFromISR(QueueHandle_t xQueue,//队列句柄
void * const pvBuffer,//保存数据的缓冲区
BaseType_t * pxTaskWoken);//标记退出函数后是否进行任务切换
/**********从队列中读取队列项,读取后不删除队列项*******************************************/
BaseType_t xQueuePeekFromISR(QueueHandle_t xQueue,//队列句柄
void * const pvBuffer,//保存数据的缓冲区);
返回值:读取数据成功,返回pdTRUE;读取失败,返回pdFALSE