freertos软件定时器
MCU一般都自带定时器,属于硬件定时器,但是不同的MCU其硬件定时器数量不同,有时需要考虑成本的问题。在硬件定时器不够用的时候,FreeRTOS也提供了定时器功能,不过是属于软件定时器,其定时精度没有硬件定时器高,但是对于精度要求不高的周期性任务也足够了
透查本质
在freertos中出现是为了方便执行定时任务,但其是个可选项,同时本质是一个高优先级任务。
软件定时器简介
软件定时器允许设置一段时间,当设置的时间到达之后就会执行回调函数。软件定时器的回调函数是在定时器服务任务中执行的,因此不能在回调函数中调用会阻塞任务的API函数
定时器是一个可选的、不属于FreeRTOS内核的功能,是由定时器服务任务来提供的。定时器相关API函数大多是使用定时器命令队列发送命令给定时器服务任务的,用户不能直接访问该命令队列。
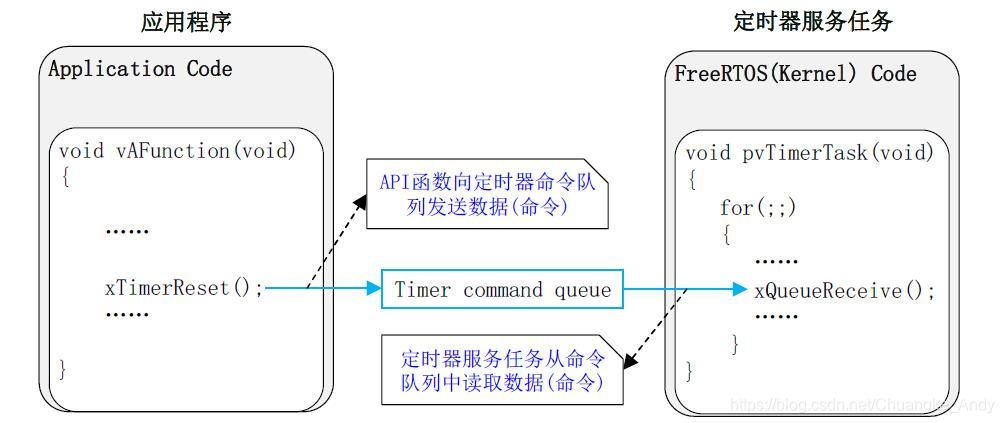
如上图示,定时器命令队列将用户应用任务和定时器服务任务连接在一起。用户应用程序调用了函数xTimerReset(),其结果是复位命令会被发送到定时器命令队列中,再由定时器服务任务来处理这个命令
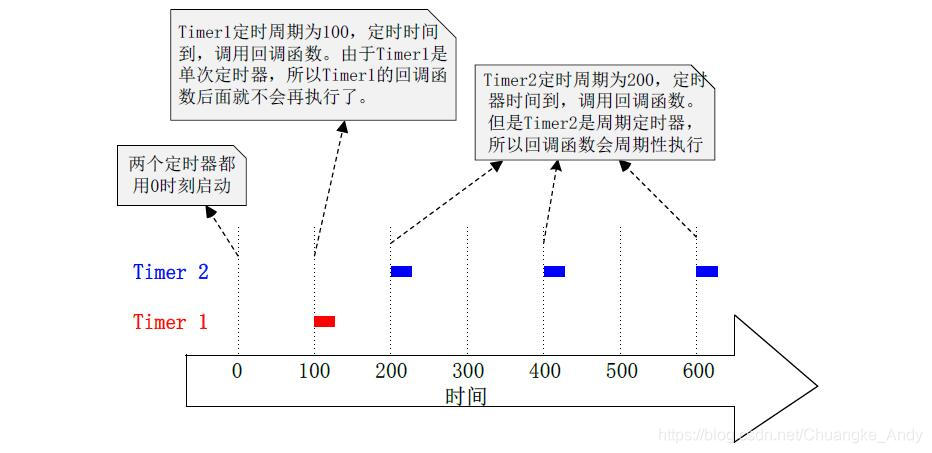
软件定时器分为两种:单次定时器和周期定时器。单次定时器在定时时间到了后执行一次回调函数就会停止运行;周期定时器一旦启动就会周期性的执行回调函数
定时器的相关配置
- configUSE_TIMERS 宏置1:自动创建定时器服务任务。
- configTIMER_TASK_PRIORITY:软件定时器服务任务的任务优先级
- configTIMER_QUEUE_LENGTH:设置定时器命令队列的队列长度
- configTIMER_TASK_STACK_DEPTH:设置定时器服务任务的任务堆栈大小
FreeRTOS启动调度器的时候会自动创建定时器服务任务,其源码如下所示:
BaseType_t xTimerCreateTimerTask( void ){
BaseType_t xReturn = pdFAIL;
/* 检查软件定时器列表和队列,若没有创建内存空间则新建 */
prvCheckForValidListAndQueue();
if( xTimerQueue != NULL ){
#if( configSUPPORT_STATIC_ALLOCATION == 1 )
{
/*****此处省略静态创建代码*****/
}
#else
{
/* 为了满足软件定时器的实时性,软件定时器任务的优先级设置为最大值 */
xReturn = xTaskCreate(prvTimerTask,
"Tmr Svc",
configTIMER_TASK_STACK_DEPTH,
NULL,
((UBaseType_t)configTIMER_TASK_PRIORITY)|portPRIVILEGE_BIT,
&xTimerTaskHandle);
}
#endif /* configSUPPORT_STATIC_ALLOCATION */
}
else{
mtCOVERAGE_TEST_MARKER();
}
configASSERT( xReturn );
return xReturn;
}
/* 检查软件定时器列表和队列 */
static void prvCheckForValidListAndQueue( void ){
taskENTER_CRITICAL();
{
/* 若队列为空,则进行列表的初始化和队列的创建 */
if( xTimerQueue == NULL ){
vListInitialise( &xActiveTimerList1 );
vListInitialise( &xActiveTimerList2 );
pxCurrentTimerList = &xActiveTimerList1;
pxOverflowTimerList = &xActiveTimerList2;
/* 开始创建消息队列 */
#if( configSUPPORT_STATIC_ALLOCATION == 1 )
{
/*****************************/
/*****此处省略静态创建代码*****/
/*****************************/
}
#else
{
xTimerQueue = xQueueCreate((UBaseType_t)configTIMER_QUEUE_LENGTH, sizeof(DaemonTaskMessage_t));
}
#endif
/*****************************/
/*****此处省略部分其他代码*****/
/*****************************/
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
taskEXIT_CRITICAL();
}
软件定时器API函数
复位软件定时器
复位软件定时器,若软件定时器已经启动,则重新计算超时时间;若软件定时器没有启动,则启动软件定时器。
/********************复位软件定时器,用在任务中************************************/
BaseType_t xTimerReset(TimerHandle_t xTimer, //要复位的软件定时器句柄
TickType_t xTicksToWait) //阻塞时间
/********************复位软件定时器,用在中断服务函数中*****************************/
BaseType_t xTimerResetFromISR(TimerHandle_t xTimer, //要复位的软件定时器句柄
BaseType_t * pxHigherPriorityTaskWoken) //退出后是否进行任务切换
/********************************************************************************/
返回值:定时器复位成功返回pdPASS;失败返回pdFAIL
复位定时器函数是一个宏,最终调用xTimerGenericCommand()函数
#define xTimerReset(xTimer, xTicksToWait) \
xTimerGenericCommand((xTimer), \
tmrCOMMAND_RESET, \
(xTaskGetTickCount()), \
NULL, \
(xTicksToWait)) \
//参数:1、软件定时器句柄;2、定义Reset编号;3、当前的系统的Tick值;4、null;5、阻塞时间
创建软件定时器
创建一个软件定时器,并返回一个软件定时器句柄。创建软件定时器后,软件定时器并没有启动。
/********************动态创建软件定时器*******************************************/
TimerHandle_t xTimerCreate(char * const pcTimerName,//软件定时器名字
TickType_t xTimerPeriodInTicks,//定时器周期(单位是时钟节拍数)
UBaseType_t uxAutoReload,//定时器模式(单次还是周期)
void * const pvTimerID,//定时器ID号
TimerCallbackFunction_t pxCallbackFunction)//定时器回调函数
/********************静态创建软件定时器*******************************************/
TimerHandle_t xTimerCreateStatic(char * const pcTimerName,//软件定时器名字
TickType_t xTimerPeriodInTicks,//定时器周期(单位是时钟节拍数)
UBaseType_t uxAutoReload,//定时器模式(单次还是周期)
void * const pvTimerID,//定时器ID号
TimerCallbackFunction_t pxCallbackFunction,//定时器回调函数
StaticTimer_t * pxTimerBuffer)//保存定时器结构体
/********************************************************************************/
返回值:创建成功返回软件定时器句柄;失败返回NULL
创建软件定时器函数xTimerCreate()的源码分析如下示:
TimerHandle_t xTimerCreate( const char * const pcTimerName,
const TickType_t xTimerPeriodInTicks,
const UBaseType_t uxAutoReload,
void * const pvTimerID,
TimerCallbackFunction_t pxCallbackFunction){
Timer_t *pxNewTimer;
//动态分配 软件定时器控制块内存空间
pxNewTimer = ( Timer_t * ) pvPortMalloc( sizeof( Timer_t ) );
if( pxNewTimer != NULL ){
//进入控制初始化
prvInitialiseNewTimer( pcTimerName, xTimerPeriodInTicks, uxAutoReload, pvTimerID, pxCallbackFunction, pxNewTimer );
}
return pxNewTimer;
}
static void prvInitialiseNewTimer(const char * const pcTimerName,
const TickType_t xTimerPeriodInTicks,
const UBaseType_t uxAutoReload,
void * const pvTimerID,
TimerCallbackFunction_t pxCallbackFunction,
Timer_t *pxNewTimer){
/* 0 is not a valid value for xTimerPeriodInTicks. */
configASSERT( ( xTimerPeriodInTicks > 0 ) );
if( pxNewTimer != NULL ){
/* 再次判断是否已经创建 队列 初始化了列表 */
prvCheckForValidListAndQueue();
/* 1、进行软件定时器控制块信息的赋值 2、把当前软件定时器列表项初始化,便于以后使用*/
pxNewTimer->pcTimerName = pcTimerName;
pxNewTimer->xTimerPeriodInTicks = xTimerPeriodInTicks;
pxNewTimer->uxAutoReload = uxAutoReload;
pxNewTimer->pvTimerID = pvTimerID;
pxNewTimer->pxCallbackFunction = pxCallbackFunction;
vListInitialiseItem( &( pxNewTimer->xTimerListItem ) );
traceTIMER_CREATE( pxNewTimer );
}
}
开启软件定时器
/****************开启软件定时器,用在任务中***********************************/
BaseType_t xTimerStart(TimerHandle_t xTimer, //要复位的软件定时器句柄
TickType_t xTicksToWait) //阻塞时间
/****************开启软件定时器,用在中断服务函数中****************************/
BaseType_t xTimerStartFromISR(TimerHandle_t xTimer, //要复位的软件定时器句柄
BaseType_t * pxHigherPriorityTaskWoken) //退出后是否进行任务切换
/********************************************************************************/
返回值:定时器开启成功返回pdPASS;失败返回pdFAIL
开始软件定时器函数是一个宏,最终调用xTimerGenericCommand()函数
#define xTimerStart(xTimer, xTicksToWait) \
xTimerGenericCommand((xTimer), \
tmrCOMMAND_START, \
(xTaskGetTickCount()), \
NULL, \
(xTicksToWait)) \
//参数:1、软件定时器句柄;2、定义Start编号;3、当前的系统的Tick值;4、null;5、阻塞时间
停止软件定时器
/****************停止软件定时器,用在任务中***********************************/
BaseType_t xTimerStop(TimerHandle_t xTimer, //要复位的软件定时器句柄
TickType_t xTicksToWait) //阻塞时间
/****************停止软件定时器,用在中断服务函数中****************************/
BaseType_t xTimerStopFromISR(TimerHandle_t xTimer, //要复位的软件定时器句柄
BaseType_t * pxHigherPriorityTaskWoken) //退出后是否进行任务切换
/********************************************************************************/
返回值:定时器停止成功返回pdPASS;失败返回pdFAIL
停止软件定时器函数是一个宏,最终也是调用xTimerGenericCommand()函数
#define xTimerStop(xTimer, xTicksToWait) \
xTimerGenericCommand((xTimer), \
tmrCOMMAND_STOP, \
0U, \
NULL, \
(xTicksToWait)) \
//参数:1、软件定时器句柄;2、定义Stop编号;3、不需要传入消息;4、null;5、阻塞时间
函数xTimerGenericCommand()的源码如下:
BaseType_t xTimerGenericCommand(TimerHandle_t xTimer,
const BaseType_t xCommandID,//标识触发的类型
const TickType_t xOptionalValue,//xTaskGetTickCount
BaseType_t * const pxHigherPriorityTaskWoken,
const TickType_t xTicksToWait){
BaseType_t xReturn = pdFAIL;
DaemonTaskMessage_t xMessage;
if( xTimerQueue != NULL ){
xMessage.xMessageID = xCommandID;
xMessage.u.xTimerParameters.xMessageValue = xOptionalValue;
xMessage.u.xTimerParameters.pxTimer = ( Timer_t * ) xTimer;
/* 判断命令类型 */
if( xCommandID < tmrFIRST_FROM_ISR_COMMAND ){
/* 判断调度器状态 */
if( xTaskGetSchedulerState() == taskSCHEDULER_RUNNING ){
xReturn = xQueueSendToBack(xTimerQueue, &xMessage, xTicksToWait);
}
else{
xReturn = xQueueSendToBack(xTimerQueue, &xMessage, tmrNO_DELAY);
}
}
else{
xReturn = xQueueSendToBackFromISR(xTimerQueue,&xMessage,pxHigherPriorityTaskWoken);
}
traceTIMER_COMMAND_SEND(xTimer, xCommandID, xOptionalValue, xReturn);
}
else{
mtCOVERAGE_TEST_MARKER();
}
return xReturn;
}