SPI
SPI简介
SPI (Serial Peripheral Interface) 是由摩托罗拉公司开发的一种高速、全双工、同步的串行通信总线。SPI广泛应用于微控制器与各种外设之间的通信,如ADC、DAC、EEPROM、Flash存储器、LCD显示器、传感器等。
SPI的主要特点
- 全双工通信:能够同时进行数据的发送和接收
- 高速传输:时钟频率可达几十MHz甚至更高
- 主从结构:明确的主机(Master)和从机(Slave)角色
- 同步通信:使用时钟信号同步数据传输
- 简单灵活:硬件接口简单,软件控制灵活
SPI基本原理
SPI采用主从架构,一个主机可以控制多个从机设备。通信过程中,主机负责产生时钟信号和控制通信的开始与结束,从机则根据主机的时钟信号进行数据收发。
工作原理
- 主机初始化:主机设置时钟频率、数据位宽、极性等参数
- 片选信号:主机通过片选信号选择要通信的从机
- 数据传输:在时钟信号的控制下,主机和从机同时发送和接收数据
- 传输结束:主机释放片选信号,结束本次通信
SPI信号线详解
标准SPI接口包含四根信号线:
1. SCK (Serial Clock)
- 功能:串行时钟信号
- 方向:主机输出,从机输入
- 作用:同步数据传输,控制数据采样时机
2. MOSI (Master Out Slave In)
- 功能:主机输出数据线
- 方向:主机输出,从机输入
- 别名:SDO (Serial Data Out)、DO (Data Out)
3. MISO (Master In Slave Out)
- 功能:主机输入数据线
- 方向:从机输出,主机输入
- 别名:SDI (Serial Data In)、DI (Data In)
4. CS/SS (Chip Select/Slave Select)
- 功能:片选信号
- 方向:主机输出,从机输入
- 特点:低电平有效,用于选择特定的从机设备
多从机连接方式
独立片选方式
Master Slave1 Slave2 Slave3
SCK ---------|SCK------|SCK------|SCK
MOSI ---------|MOSI-----|MOSI-----|MOSI
MISO ---------|MISO-----|MISO-----|MISO
CS1 ---------|CS | |
CS2 ---------| |CS |
CS3 ---------| | |CS
菊花链方式
Master Slave1 Slave2 Slave3
SCK -----|SCK-------|SCK-------|SCK
MOSI -----|MOSI | |
| | MISO-|MOSI |
MISO | | | MISO-|MOSI
|____|MISO______|MISO______|MISO
CS -----|CS--------|CS--------|CS
SPI通信模式
SPI有四种工作模式,由时钟极性(CPOL)和时钟相位(CPHA)决定:
模式参数
| 模式 | CPOL | CPHA | 时钟极性 | 数据采样 |
|---|---|---|---|---|
| 0 | 0 | 0 | 空闲时低电平 | 第一个边沿采样 |
| 1 | 0 | 1 | 空闲时低电平 | 第二个边沿采样 |
| 2 | 1 | 0 | 空闲时高电平 | 第一个边沿采样 |
| 3 | 1 | 1 | 空闲时高电平 | 第二个边沿采样 |
详细说明
CPOL (Clock Polarity) - 时钟极性
- CPOL = 0:时钟信号空闲时为低电平
- CPOL = 1:时钟信号空闲时为高电平
CPHA (Clock Phase) - 时钟相位
- CPHA = 0:在第一个时钟边沿采样数据
- CPHA = 1:在第二个时钟边沿采样数据
SPI时序分析
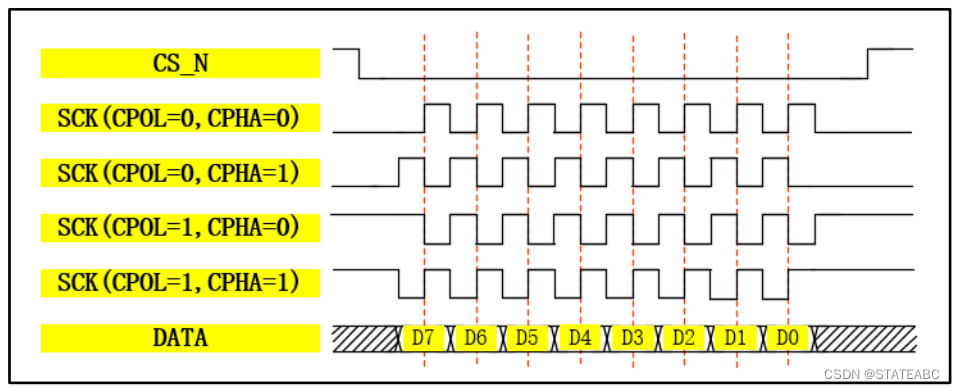
Mode0:CKP=0,CPHA =0:当空闲态时,SCK处于低电平,数据采样是在第1个边沿,即SCK由低电平到高电平的跳变,所以数据采样是在上升沿(准备数据),(发送数据)数据发送是在下降沿。
Mode1:CKP=0,CPHA=1:当空闲态时,SCK处于低电平,数据发送是在第2个边沿,即SCK由低电平到高电平的跳变,所以数据采样是在下降沿,数据发送是在上升沿。
Mode2:CKP=1,CPHA=0:当空闲态时,SCK处于高电平,数据采集是在第1个边沿,即SCK由高电平到低电平的跳变,所以数据采集是在下降沿,数据发送是在上升沿。
Mode3:CKP=1,CPHA=1:当空闲态时,SCK处于高电平,数据发送是在第2个边沿,即SCK由高电平到低电平的跳变,所以数据采集是在上升沿,数据发送是在下降沿。
数据传输特点
- CS信号:传输开始前拉低,传输结束后拉高
- 数据建立:数据在时钟有效边沿前建立
- 数据采样:在时钟的上升沿或下降沿采样
- MSB优先:通常高位在前传输
SPI衍生协议
1. Microwire
特点:
- 由National Semiconductor开发
- 通常为8位数据传输
- 半双工通信
- 应用于EEPROM、ADC等设备
信号线:
- SK (Serial Clock)
- DI (Data In)
- DO (Data Out)
- CS (Chip Select)
2. QSPI (Quad SPI)
特点:
- 四线并行数据传输
- 传输速度提升4倍
- 广泛用于Flash存储器
- 支持多种指令模式
信号线:
- CLK:时钟信号
- CS:片选信号
- IO0-IO3:四根双向数据线
传输模式:
Standard SPI: 1-1-1 (指令-地址-数据都是1线)
Dual SPI: 1-1-2 (数据阶段2线)
Quad SPI: 1-1-4 (数据阶段4线)
QPI Mode: 4-4-4 (全程4线)
3. I3C (Improved Inter-Integrated Circuit)
特点:
- MIPI联盟开发的新一代接口
- 向下兼容I2C
- 支持动态地址分配
- 具备中断和热插拔功能
4. DSPI (Dual SPI)
特点:
- 双线数据传输
- 速度比标准SPI快一倍
- 保持向下兼容
STM32 SPI配置详解
SPI控制器结构
STM32的SPI控制器主要包含:
- 数据寄存器 (DR)
- 控制寄存器 (CR1, CR2)
- 状态寄存器 (SR)
- 波特率预分频寄存器 (BR)
时钟配置
STM32 SPI时钟源通常来自APB总线:
// 使能SPI时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);
// 时钟分频计算
// SPI频率 = APB频率 / 预分频值
// 预分频值:2, 4, 8, 16, 32, 64, 128, 256
GPIO配置
void SPI_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// 使能GPIO时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
// 配置SCK, MOSI为复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 配置MISO为浮空输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 配置CS为推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
SPI参数配置
void SPI_Mode_Config(void)
{
SPI_InitTypeDef SPI_InitStructure;
// SPI基本配置
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; // 双线全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; // 主机模式
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; // 8位数据
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; // 时钟极性
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; // 时钟相位
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; // 软件NSS
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_8; // 8分频
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; // MSB先行
SPI_InitStructure.SPI_CRCPolynomial = 7; // CRC多项式
SPI_Init(SPI1, &SPI_InitStructure);
// 使能SPI
SPI_Cmd(SPI1, ENABLE);
}
STM32 SPI编程实例
基础读写函数
// SPI发送接收一个字节
uint8_t SPI_SendByte(uint8_t byte)
{
// 等待发送缓冲区空
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET);
// 发送数据
SPI_I2S_SendData(SPI1, byte);
// 等待接收缓冲区非空
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET);
// 返回接收到的数据
return SPI_I2S_ReceiveData(SPI1);
}
// CS控制宏定义
#define SPI_CS_LOW() GPIO_ResetBits(GPIOA, GPIO_Pin_4)
#define SPI_CS_HIGH() GPIO_SetBits(GPIOA, GPIO_Pin_4)
EEPROM读写实例
// EEPROM写入函数
void EEPROM_Write(uint16_t addr, uint8_t data)
{
SPI_CS_LOW(); // 片选拉低
SPI_SendByte(0x06); // 写使能指令
SPI_CS_HIGH(); // 片选拉高
delay_us(10);
SPI_CS_LOW(); // 重新选中
SPI_SendByte(0x02); // 写指令
SPI_SendByte((addr >> 8) & 0xFF); // 地址高8位
SPI_SendByte(addr & 0xFF); // 地址低8位
SPI_SendByte(data); // 数据
SPI_CS_HIGH(); // 片选拉高
}
// EEPROM读取函数
uint8_t EEPROM_Read(uint16_t addr)
{
uint8_t data;
SPI_CS_LOW(); // 片选拉低
SPI_SendByte(0x03); // 读指令
SPI_SendByte((addr >> 8) & 0xFF); // 地址高8位
SPI_SendByte(addr & 0xFF); // 地址低8位
data = SPI_SendByte(0xFF); // 读取数据
SPI_CS_HIGH(); // 片选拉高
return data;
}
DMA模式传输
void SPI_DMA_Config(void)
{
DMA_InitTypeDef DMA_InitStructure;
// 使能DMA时钟
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
// DMA发送配置
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)&SPI1->DR;
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)TxBuffer;
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralDST;
DMA_InitStructure.DMA_BufferSize = BUFFER_SIZE;
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal;
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
DMA_Init(DMA1_Channel3, &DMA_InitStructure);
// 使能SPI DMA发送
SPI_I2S_DMACmd(SPI1, SPI_I2S_DMAReq_Tx, ENABLE);
}
中断方式
void SPI_NVIC_Config(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = SPI1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
// 使能SPI中断
SPI_I2S_ITConfig(SPI1, SPI_I2S_IT_RXNE, ENABLE);
}
// 中断服务函数
void SPI1_IRQHandler(void)
{
uint8_t data;
if (SPI_I2S_GetITStatus(SPI1, SPI_I2S_IT_RXNE) != RESET)
{
data = SPI_I2S_ReceiveData(SPI1);
// 处理接收到的数据
ProcessReceivedData(data);
SPI_I2S_ClearITPendingBit(SPI1, SPI_I2S_IT_RXNE);
}
}
参考链接